EM算法
之前在看概率图模型的时候,写过关于EM算法的内容,不过已经忘记差不多了,最近在看[1]中的材料,感觉有了新的理解,特将这些内容整理成这篇博客。
EM算法适用于存在隐变量的情况,或者说是假设存在因变量对系统进行推导。
\begin{equation}\begin{split} log\ p(X\mid \theta) &= \int q(Z)log\ p(X\mid \theta)dZ \\
&= \int q(Z)log \frac{p(X, Z\mid \theta)}{p(Z\mid X, \theta)}dZ \\
&= \int q(Z)log \frac{p(X, Z\mid \theta)}{q(Z)}dZ + \int q(Z) log \frac{q(Z)}{p(Z\mid X, \theta)}dZ\\
&= L(q, \theta) + KL(q\mid\mid p) \geqslant L(q, \theta)\\
\end{split}\end{equation}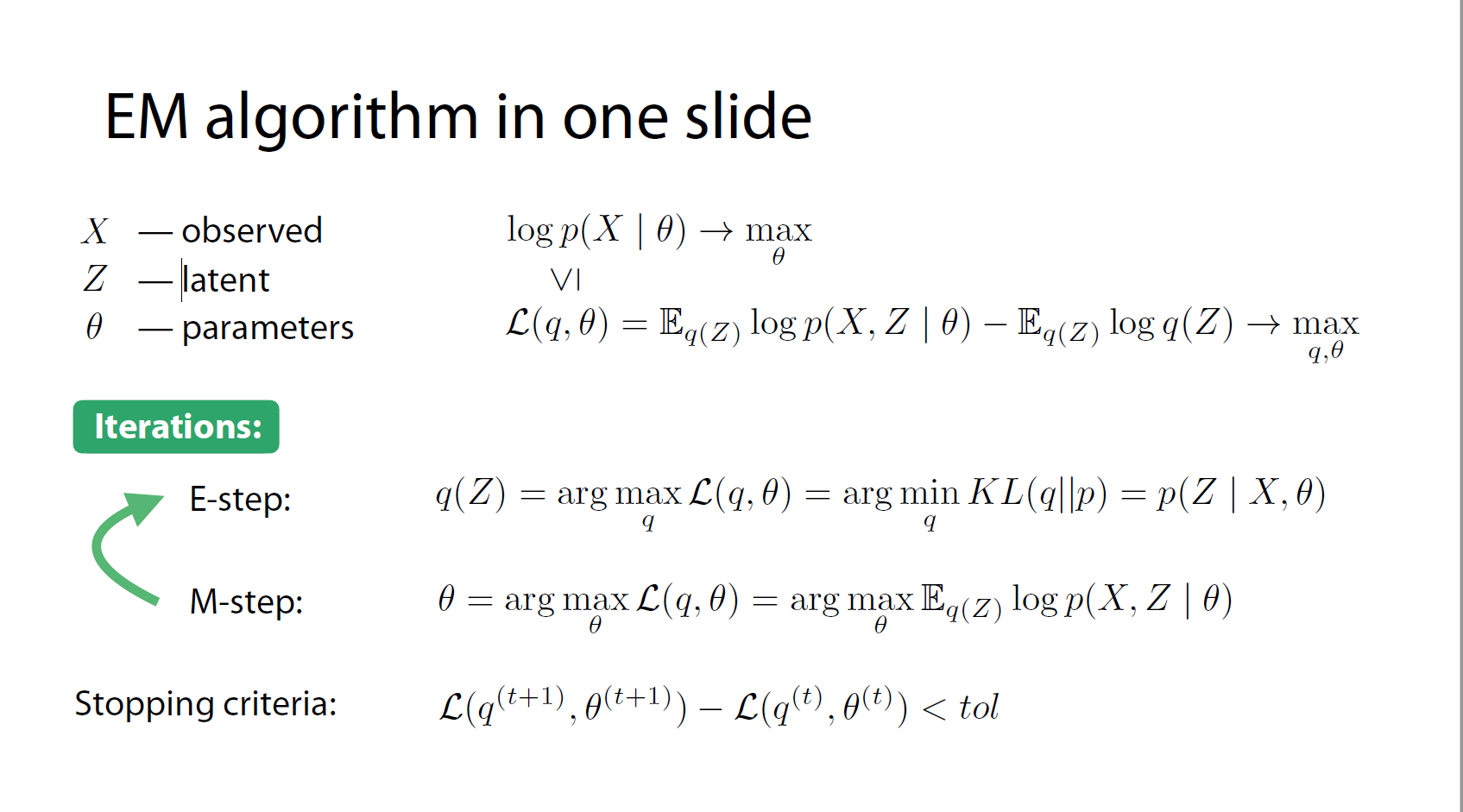
E步是为了获得隐变量的最优值,M步是对参数求最大似然。
问题描述
有$K$张受噪声污染的图片,每张图片大小为$H\times W$,每张图片上都有$H\times w$大小的人脸,每张人脸的位置不固定,但是高度相同,都与图片的高度一样。如下图所示,每张图片都是受严重受噪声污染的,可以看成是高斯噪声。可以从这里得到数据集,该数据集为.mat格式,其中包含有500张$45\times 60$的图片,其中人脸大小为$45\times 36$
下图是图片的结构,其中$d_k$的位置是不固定的,$F$是不含噪声的人脸图片,$B$是不含噪声的背景图片。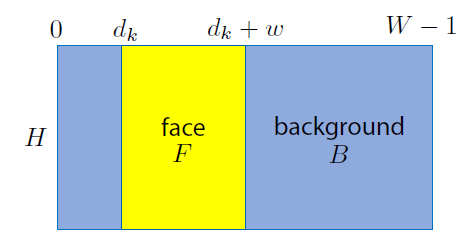
下面基于EM算法来思考该问题:
可观数据:$K$张受污染的图片,$X = \lbrace X_1, …, X_K \rbrace$
隐变量:$F$的位置,$d = \lbrace d_1, …, d_K \rbrace$
参数:$\theta = \lbrace B, F, s^2\rbrace$
似然函数:
$$ p(X_k\mid d_k, \theta) = \prod_{ij}\begin{cases} N(X_k[i, j]\mid F[i,j-d_k], s^2), & \text {if $[i, j]\in faceArea(d_k)$} \\ N(X_k[i, j]\mid B[i, j], s^2), & \text{otherwise} \end{cases} $$
因为每张图片中$F$和$B$部分减去对应的$F$和$B$,这样就是纯粹的噪声,我们将噪声看做是高斯分布,所以上式就是上面的形式。
以及先验:
$p(d_k\mid a) = a[d_k] $, $\sum_j a[j] = 1$,,$a\in R^{W-w+1}$
概率模型可以写成:
$$ p(X, d\mid \theta, a) = \prod_k p(X_k\mid d_k, \theta)p(d_k\mid a) $$
按照第一张图中的EM算法步骤,进行EM算法的推导:
E步:确定隐变量的最优值
\begin{equation}\begin{split} q(d) = p(d\mid X, \theta, a) &= \prod_k p(d_k\mid x_k, \theta, a)\\
&= \prod_k\frac{p(X_k, d_k\mid \theta, a)}{\sum_{d_k’} p(X_k, d_k’\mid \theta, a)} \\
&= \prod_k\frac{p(X_k\mid d_k, theta)p(d_k\mid a)}{\sum_{d_k’} p(X_k\mid d_k’, theta)p(d_k’\mid a)} \\
\end{split}\end{equation}
M步:对参数求最大似然。
$$ Q(\theta, a) = E_{q(d)}log\ p(X, d\mid \theta, a) \rightarrow max_{\theta, a} $$
具体推导这里就不再详细的描述了,可以参照参考文献[1]中的推导过程,最后的推导结果如下:
$$a[j] = \frac{\sum_k q( d_k = j )}{\sum_{j’} \sum_{k’} q( d_{k’} = j’)}$$
$$F[i, m] = \frac 1 K \sum_k \sum_{d_k} q(d_k), X^k[i,, m+d_k]$$
$$B[i, j] = \frac {\sum_k \sum_{ d_k:, (i, ,j) ,\not\in faceArea(d_k)} q(d_k), X^k[i, j]}
{\sum_k \sum_{d_k: ,(i, ,j), \not\in faceArea(d_k)} q(d_k)}$$
$$s^2 = \frac 1 {HWK} \sum_k \sum_{d_k} q(d_k)
\sum_{i,, j} (X^k[i, ,j] - Model^{d_k}[i, ,j])^2$$
其中$Model^{d_k}[i, j]$表示由$F$和$B$组成的图片,其中$F$处于$d_k$位置。
程序实现
下面用EM算法来是处理对受噪声污染影响的图片,从而恢复其中的人脸图像。
程序思路为
- 实现对数似然;
- 实现variational lower bound;
- 实现E步;
- 实现M步;
- 将循环执行EM步,知道满足结束条件。
具体程序
- 实现对数似然,似然函数为:$$ p(X_k\mid d_k, \theta) = \prod_{ij}\begin{cases} N(X_k[i, j]\mid F[i,j-d_k], s^2), & \text {if $[i, j]\in faceArea(d_k)$} \\ N(X_k[i, j]\mid B[i, j], s^2), & \text{otherwise} \end{cases} $$
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32def calculate_log_probability(X, F, B, s):
"""
Calculates log p(X_k|d_k, F, B, s) for all images X_k in X and
all possible face position d_k.
Parameters
----------
X : array, shape (H, W, K)
K images of size H x W.
F : array, shape (H, w)
Estimate of prankster's face.
B : array, shape (H, W)
Estimate of background.
s : float
Estimate of standard deviation of Gaussian noise.
Returns
-------
ll : array, shape(W-w+1, K)
ll[dw, k] - log-likelihood of observing image X_k given
that the prankster's face F is located at position dw
"""
# your code here
H, W, K = np.shape(X)
_, w = np.shape(F)
ll = np.zeros((W-w+1, K), dtype=float)
for dw in range(W-w+1):
for k in range(K):
ll[dw, k] = H*w*np.log(1/(s*np.sqrt(2*np.pi))) - np.sum((X[:, dw:dw+w, k] - F)**2/(2 * s**2)) + \
H*dw*np.log(1/(s*np.sqrt(2*np.pi))) - np.sum((X[:, 0:dw, k] - B[:, 0:dw])**2/(2 * s**2)) + \
H*(W-w-dw)*np.log(1/(s*np.sqrt(2*np.pi))) - np.sum((X[:, dw+w:, k] - B[:, dw+w:])**2/(2 * s**2))
return ll - 实现Variational lower bound
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32def calculate_lower_bound(X, F, B, s, a, q):
"""
Calculates the lower bound L(q, F, B, s, a) for
the marginal log likelihood.
Parameters
----------
X : array, shape (H, W, K)
K images of size H x W.
F : array, shape (H, w)
Estimate of prankster's face.
B : array, shape (H, W)
Estimate of background.
s : float
Estimate of standard deviation of Gaussian noise.
a : array, shape (W-w+1)
Estimate of prior on position of face in any image.
q : array
q[dw, k] - estimate of posterior
of position dw
of prankster's face given image Xk
Returns
-------
L : float
The lower bound L(q, F, B, s, a)
for the marginal log likelihood.
"""
# your code here
ll = calculate_log_probability(X, F, B, s)
L = np.sum(q*ll) + np.sum(q.T*np.log(a)) - np.sum(q*np.log(q))
return L - E步
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36def run_e_step(X, F, B, s, a):
"""
Given the current esitmate of the parameters, for each image Xk
esitmates the probability p(d_k|X_k, F, B, s, a).
Parameters
----------
X : array, shape(H, W, K)
K images of size H x W.
F : array_like, shape(H, w)
Estimate of prankster's face.
B : array shape(H, W)
Estimate of background.
s : float
Eestimate of standard deviation of Gaussian noise.
a : array, shape(W-w+1)
Estimate of prior on face position in any image.
Returns
-------
q : array
shape (W-w+1, K)
q[dw, k] - estimate of posterior of position dw
of prankster's face given image Xk
"""
# your code here
# 使用logsumexp的方法
# ad = log p(x_k| d_k, F, B, s) + log p(d_k,|a)
# d* = argmax_d{ad}
# log \sum exp(ad)= ad* + log\sum_d exp(ad-ad*)
ll = calculate_log_probability(X, F, B, s)
ad = ll + np.log(a).T.reshape(a.shape[0], 1)
ad_max = np.max(ad, axis=0)
q = ad - ad_max - np.log(np.sum(np.exp(ad - ad_max), axis=0))
q = np.exp(q)
return q - M步
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58def run_m_step(X, q, w):
"""
Estimates F, B, s, a given esitmate of posteriors defined by q.
Parameters
----------
X : array, shape (H, W, K)
K images of size H x W.
q :
q[dw, k] - estimate of posterior of position dw
of prankster's face given image Xk
w : int
Face mask width.
Returns
-------
F : array, shape (H, w)
Estimate of prankster's face.
B : array, shape (H, W)
Estimate of background.
s : float
Estimate of standard deviation of Gaussian noise.
a : array, shape (W-w+1)
Estimate of prior on position of face in any image.
"""
# your code here
H, W, K = X.shape
F = np.zeros((H, w))
B = np.zeros((H, W))
s = 0.0
# a
a = np.sum(q, axis=1)/np.sum(q)
# F
for m in range(w):
for k in range(K):
F[:, m] = (1/K*np.sum(q[:, k]*X[:, m:W-w+1+m, k], axis=1)) + F[:, m]
# B
B1 = np.zeros((H, W))
B2 = np.zeros((H, W))
for dw in range(W-w+1):
for k in range(K):
B1[:, :dw] = q[dw, k] * X[:, :dw, k] + B1[:, :dw]
B1[:, dw+w:] = q[dw, k] * X[:, dw+w:, k] + B1[:, dw+w:]
B2[:, :dw] = q[dw, k] + B2[:, :dw]
B2[:, dw+w:] = q[dw, k] + B2[:, dw+w:]
B = B1/B2
# s
s_square = 0
for dw in range(W-w+1):
for k in range(K):
s_square = q[dw, k] * (np.sum((X[:, :dw, k] - B[:, :dw])**2) + np.sum((X[:, dw:dw+w, k] - F)**2)+ \
np.sum((X[:, dw+w:, k] - B[:, dw+w:])**2)) + s_square
s = np.sqrt(1/(K*W*H) * s_square)
return F, B, s, a - 对&E&步与&M&步交替运行,当$L(q, ,F, ,B, ,s, ,a)$增加值小于提前设定好的阈值时,程序结束。最终实验结果,人脸图片和背景图如下所示:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58def run_m_step(X, q, w):
"""
Estimates F, B, s, a given esitmate of posteriors defined by q.
Parameters
----------
X : array, shape (H, W, K)
K images of size H x W.
q :
q[dw, k] - estimate of posterior of position dw
of prankster's face given image Xk
w : int
Face mask width.
Returns
-------
F : array, shape (H, w)
Estimate of prankster's face.
B : array, shape (H, W)
Estimate of background.
s : float
Estimate of standard deviation of Gaussian noise.
a : array, shape (W-w+1)
Estimate of prior on position of face in any image.
"""
# your code here
H, W, K = X.shape
F = np.zeros((H, w))
B = np.zeros((H, W))
s = 0.0
# a
a = np.sum(q, axis=1)/np.sum(q)
# F
for m in range(w):
for k in range(K):
F[:, m] = (1/K*np.sum(q[:, k]*X[:, m:W-w+1+m, k], axis=1)) + F[:, m]
# B
B1 = np.zeros((H, W))
B2 = np.zeros((H, W))
for dw in range(W-w+1):
for k in range(K):
B1[:, :dw] = q[dw, k] * X[:, :dw, k] + B1[:, :dw]
B1[:, dw+w:] = q[dw, k] * X[:, dw+w:, k] + B1[:, dw+w:]
B2[:, :dw] = q[dw, k] + B2[:, :dw]
B2[:, dw+w:] = q[dw, k] + B2[:, dw+w:]
B = B1/B2
# s
s_square = 0
for dw in range(W-w+1):
for k in range(K):
s_square = q[dw, k] * (np.sum((X[:, :dw, k] - B[:, :dw])**2) + np.sum((X[:, dw:dw+w, k] - F)**2)+ \
np.sum((X[:, dw+w:, k] - B[:, dw+w:])**2)) + s_square
s = np.sqrt(1/(K*W*H) * s_square)
return F, B, s, a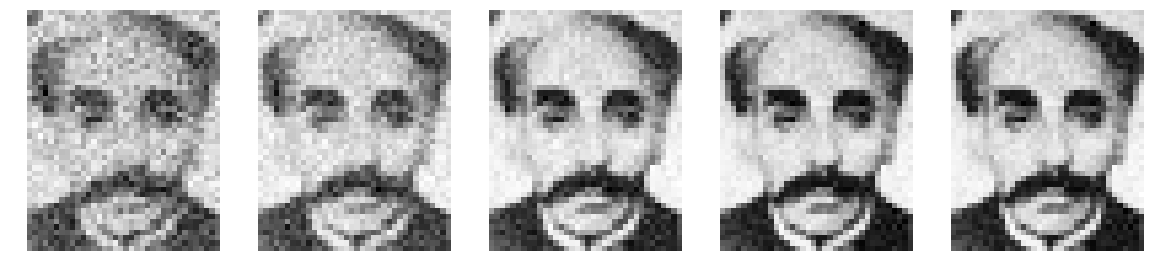
问题与总结
变成中遇到了一个问题,就是求解q时会出现0的情况,这样就会导致$log\ 0$的情况出现,出现错误,不知道怎么结果,但是结果却可以跑出了,不过图片并不是特别清晰,我想如果用deep learning的方法训练估计可以达到一个比较好的结果。EM算法可以看成特殊的坐标下降发,对lower bound按照隐变量和参数进行坐标寻优。
参考资料
[1] http://deepbayes.ru/ 主要来自其中的slide
[2] https://cw.fel.cvut.cz/old/courses/ae4b33rpz/labs/12_em/start